DIY all-terrain Robotic Lawn Mower — Initial design
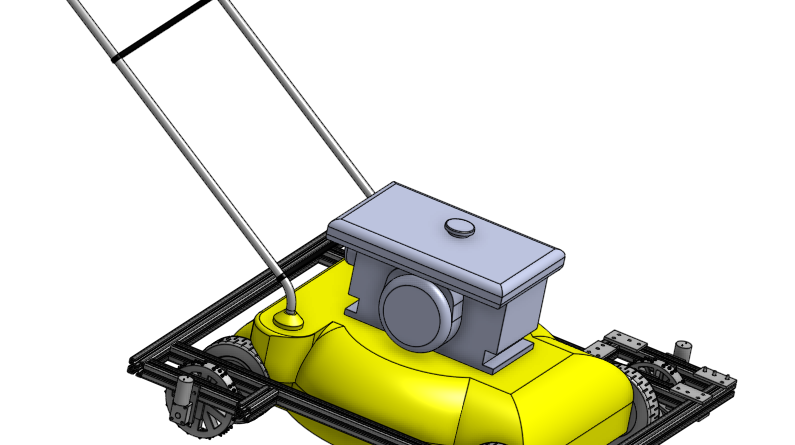
I’ve been working on the design for an all-terrain robotic lawn mower for awhile. I’ve purchased and used two major brands of robotic mowers over the years, Robomower and Lawnbott. Both brands work pretty good, but they’re not robust enough for my backyard! My yard is a real challenge for robotic mowers — steep hill, large holes, loose soil, etc. Robot mowers work great, but they get stuck easily and don’t have a lot of horsepower driving the cutting wheel. I think a good solution to both of these problems is to combine a standard push-mower and the autonomous driving of a robotic mower. This is my current design for an all-terrain robot mower:
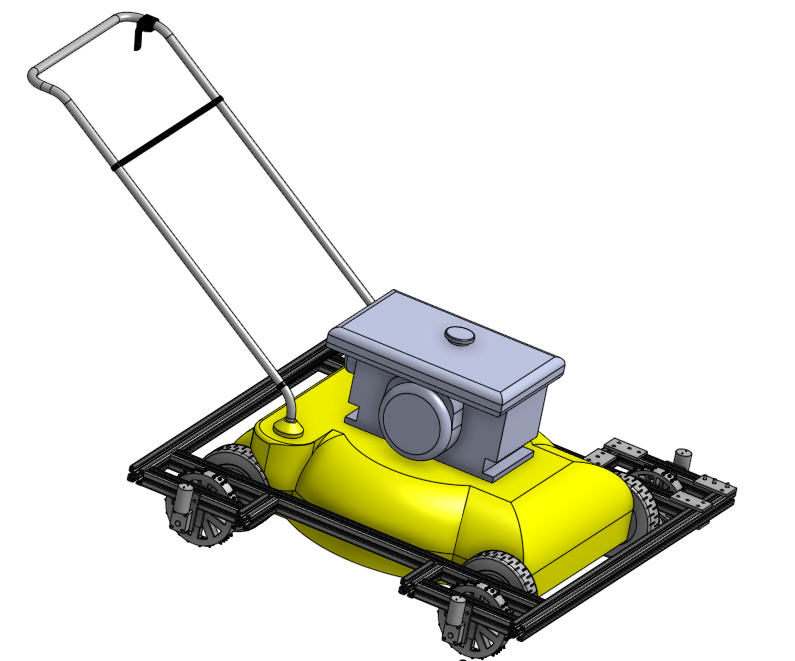
As you can see the robot mower is going to be all-wheel drive and in the center resides a standard Bolen brand push mower. Here is a close-up of the gearmotor driven spiked wheel:
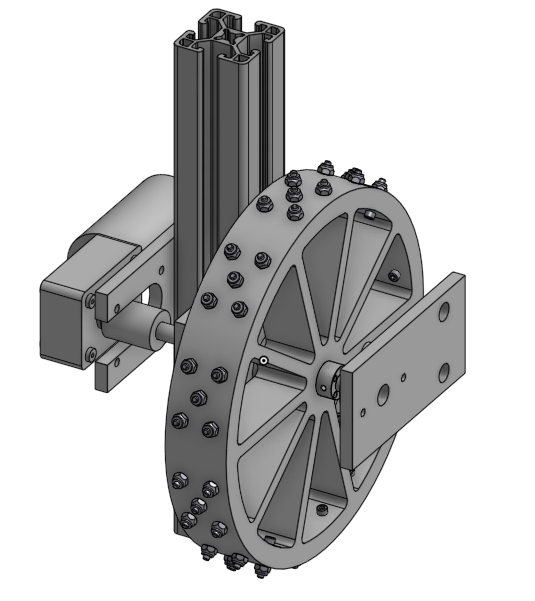
My first design of the spiked wheel was completely 3D printed, but I was worried that the 3D printed spikes wouldn’t hold up to the abuse:

Original 3D printed spiked wheel.